为什么需要 Pin 设备驱动框架
- 跨平台可移植应用
- 操作简单
试想下面这个场景:
你基于 STM32 MCU 编写了一个包含很多 GPIO 操作的应用程序,GPIO 控制函数使用的是 HAL 库。
后面,由于某种原因,MCU 需要更换,使用的是 NXP 的芯片,不支持 HAL 库,那你怎么办?
通常,你会查找所有 GPIO 操作相关的接口,然后替换成 NXP 提供的 GPIO 驱动函数,如果 GPIO 的编排方式不一样(有的有 GPIOA 这样的分组,有的没有),那就更加的麻烦。这样,你就维护了两个版本的应用程序。
那么,有了 Pin 驱动框架能解决这个问题吗?
当然,Pin 只能解决应用层代码不需要变动的问题,但需要将 GPIO 驱动对接到 Pin 驱动框架上。
另外,RT-Thread Pin 设备驱动框架采用了统一 GPIO 号编排的方式,从 0 开始向上计数,每一个 GPIO 对应一个 pin 号。这样做的好处是,应用程序无需关心该 GPIO 属于哪一个组(GPIOA,还是 GPIOB),也无需关心相关 GPIO 的时钟初始化、中断等。因为,Pin 设备驱动框架都帮你抽象好了。
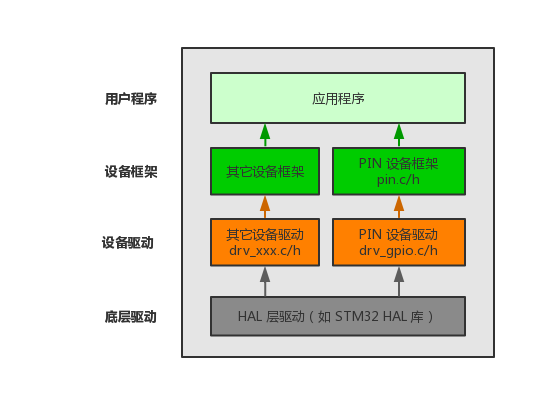
怎么对接到 Pin 设备框架
首先了解下文件结构
PIN 设备框架对应文件:
- pin.h
- pin.c
源文件路径: components/drivers/misc/pin.c
对接到 PIN 设备框架的驱动代码需要我们自行实现(如果官方没有现成的 BSP 可以使用),为了保持驱动实现的一致性,这里有一些潜在规则:
- RT-Thread 通常将对接设备框架的驱动相关文件存放在对应 bsp 的 drivers 目录下
- 驱动程序文件命名采用 drv_ 前缀加驱动名称的方式
当然,并不是所有的 BSP 对接 rt-thread 设备框架的驱动程序文件都存放在 drivers 目录下,如 STM32 新 BSP 中的驱动实现在 rt-thread/bsp/stm32/libraries/HAL_Drivers 目录下。
由此,本次我们需要实现的 GPIO 驱动如下:
GPIO 驱动对应文件:
- drv_gpio.h
- drv_gpio.c
PIN 驱动框架和 GPIO 驱动对接
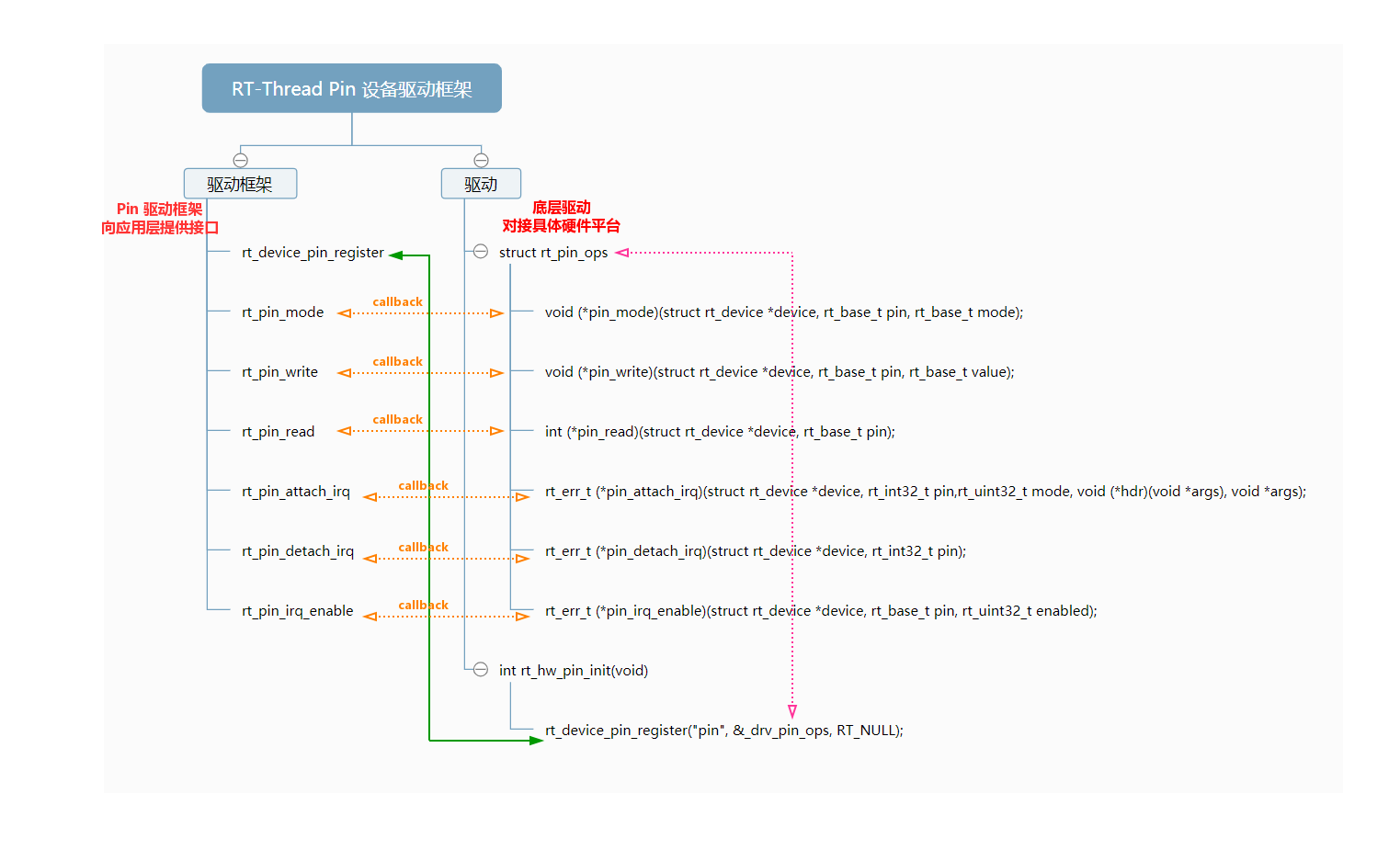
从上图可以直观地看到 Pin 设备驱动框架和 GPIO 驱动是如果对接到一起的。
如上图所示:
- 左侧为 Pin 设备驱动框架封装的 API 接口,向上提供给应用层使用;
- 右侧为具体芯片平台对接 Pin 设备的驱动程序,与 Pin 设备框架提供的 API 接口一一对应,通过 rt_pin_ops 结构体关联到一起,驱动框架层接口最终会回调驱动层接口;
- 最后通过 rt_device_pin_register 函数接口,将底层驱动与 Pin 设备框架绑定到一起,注册到 RT-Thread 的设备框架中。
在对接 RT-Thread Pin 设备框架的时候,仅需要实现上图右侧 rt_pin_ops 结构体中的所有 callback 回调函数即可,然后通过 rt_device_pin_register 注册到系统,最后使用 rt_hw_pin_init 调用以进行初始化。rt_hw_pin_init 在系统启动过程中被 rt_hw_board_init 调用。
注意:
需要注意的是 rt_pin_attach_irq 接口的使用,其函数原型如下:
rt_err_t rt_pin_attach_irq(rt_int32_t pin, rt_uint32_t mode,
void (*hdr)(void *args), void *args)该函数的功能是,为指定的 pin 脚绑定中断回调函数 hdr,并设置对应的中断模式 mode 。该函数是唯一的从应用层,通过 Pin 设备框架向下注册到 GPIO 驱动层的 API 接口。
用户在实现 rt_pin_attach_irq 对应的 pin_attach_irq 回调函数时,记得将 hdr 回调函数应用到对应 pin 脚的外部中断 Handler 中。
如何使用
RT-Thread 官方的文档中心中 Pin 设备给出了一个基本的测试例程,这里做引用,如下所示:
以下内容引用自 RT-Thread 文档中心,地址:https://www.rt-thread.org/document/site/programming-manual/device/pin/pin/
PIN 设备的具体使用方式可以参考如下示例代码,示例代码的主要步骤如下:
- 设置蜂鸣器对应引脚为输出模式,并给一个默认的低电平状态
- 设置按键 0 和 按键1 对应引脚为输入模式,然后绑定中断回调函数并使能中断
- 按下按键 0 蜂鸣器开始响,按下按键 1 蜂鸣器停止响
代码如下:
/*
* 程序清单:这是一个 PIN 设备使用例程
* 例程导出了 pin_beep_sample 命令到控制终端
* 命令调用格式:pin_beep_sample
* 程序功能:通过按键控制蜂鸣器对应引脚的电平状态控制蜂鸣器
*/
#include <rtthread.h>
#include <rtdevice.h>
/* 引脚编号,通过查看设备驱动文件drv_gpio.c确定 */
#ifndef BEEP_PIN_NUM
#define BEEP_PIN_NUM 35 /* PB0 */
#endif
#ifndef KEY0_PIN_NUM
#define KEY0_PIN_NUM 55 /* PD8 */
#endif
#ifndef KEY1_PIN_NUM
#define KEY1_PIN_NUM 56 /* PD9 */
#endif
void beep_on(void *args)
{
rt_kprintf("turn on beep!\n");
rt_pin_write(BEEP_PIN_NUM, PIN_HIGH);
}
void beep_off(void *args)
{
rt_kprintf("turn off beep!\n");
rt_pin_write(BEEP_PIN_NUM, PIN_LOW);
}
static void pin_beep_sample(void)
{
/* 蜂鸣器引脚为输出模式 */
rt_pin_mode(BEEP_PIN_NUM, PIN_MODE_OUTPUT);
/* 默认低电平 */
rt_pin_write(BEEP_PIN_NUM, PIN_LOW);
/* 按键0引脚为输入模式 */
rt_pin_mode(KEY0_PIN_NUM, PIN_MODE_INPUT_PULLUP);
/* 绑定中断,下降沿模式,回调函数名为beep_on */
rt_pin_attach_irq(KEY0_PIN_NUM, PIN_IRQ_MODE_FALLING, beep_on, RT_NULL);
/* 使能中断 */
rt_pin_irq_enable(KEY0_PIN_NUM, PIN_IRQ_ENABLE);
/* 按键1引脚为输入模式 */
rt_pin_mode(KEY1_PIN_NUM, PIN_MODE_INPUT_PULLUP);
/* 绑定中断,下降沿模式,回调函数名为beep_off */
rt_pin_attach_irq(KEY1_PIN_NUM, PIN_IRQ_MODE_FALLING, beep_off, RT_NULL);
/* 使能中断 */
rt_pin_irq_enable(KEY1_PIN_NUM, PIN_IRQ_ENABLE);
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(pin_beep_sample, pin beep sample);本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!